目的:¶
- 掌握利用正背面关联进行能量刻度的方法
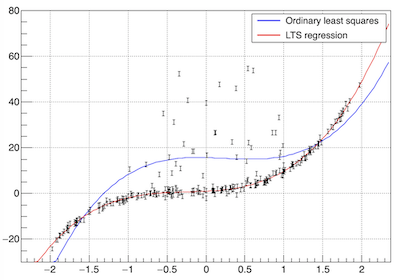
- ROBUST fit
Front-back correlation neglecting crosstalks¶
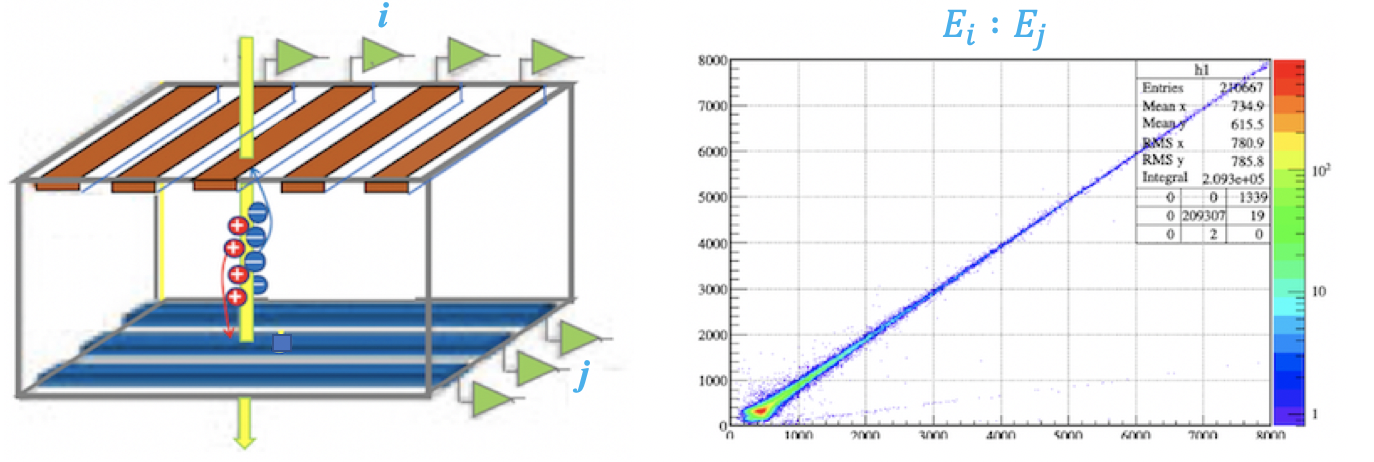
- 入射粒子产生的载流子在漂移过程中,在正负极上产生等量异号的感应电荷。
- 在两侧采用不同极性的主放大器,可以得到幅度相同的正信号。
- 即有, $E_{x_i} = E_{y_j}$
correlation¶
粒子在入射位置为:xstrip = i 、ystrip = j ,标记为 $(x_i,y_j)$
对于入射到 $(x_i,y_j)$ ,能量沉积为 E 的粒子, 在 x, y侧记录的信号道值分别为 $A_{x_i},A_{y_j}$:
由(1)-(3)式可得: $$ A_{x_i}=K_{x_iy_j}A_{y_j}+B_{x_iy_j} \tag{4} $$
其中$K_{x_iy_j}=\frac{k_{y_j}}{k_{x_i}}$, $B_{x_iy_j}=\frac{b_{y_j}}{k_{x_i}} - b_{x_i}$
上式中 $K_{x_iy_j}, B_{x_iy_j}$ 称为 $A_{y_j}$ 相对于 $A_{x_i}$ 的归一化系数。
将 (4) 式与能量刻度公式 $E = k*ch +b$ 类比,可知公式(4) 给出了将 $A_{y_j}$幅度归一到$A_{x_i}$的函数关系。为方便描述,以下称 $x_i$ 为参考条, $y_j$ 为待刻度条。
上图右侧显示了$A_{x_i}与A_{y_j}$的二维关联图,可以看出二者呈现很好的线性关系,利用上式进行线性拟合即可确定$K_{x_iy_j},B_{x_iy_j}系数$。
多粒子入射位置的确定¶
- 两个入射粒子同时入射到DSSD,实际入射位置和能量分别为:
- 粒子1:$(x_{i_1},y_{j_1})$, $(e_{x_{i_1}}=e_{y_{j_1}})$,粒子2:$(x_{i_2},y_{j_2})$, $(e_{x_{i_2}}=e_{y_{j_2}})$, 且$(e_{x_{i_1}}\neq e_{y_{j_2}})$
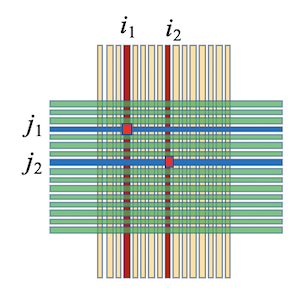
可能的入射组合为$(x_{i_1},y_{j_1}),(x_{i_2},y_{j_2}) 或 (x_{i_1},y_{j_2}),(x_{i_2},y_{j_1})$
与实际入射位置一致的组合,其正背面的能量差值最小,即:
- $|e_{x_{i_1}}-e_{y_{j_1}}| < |e_{x_{i_1}}-e_{y_{j_2}}|$ && $|e_{x_{i_2}}-e_{y_{j_2}}| < |e_{x_{i_2}}-e_{y_{j_1}}|$。
进行上述步骤时,必须先进行能量刻度